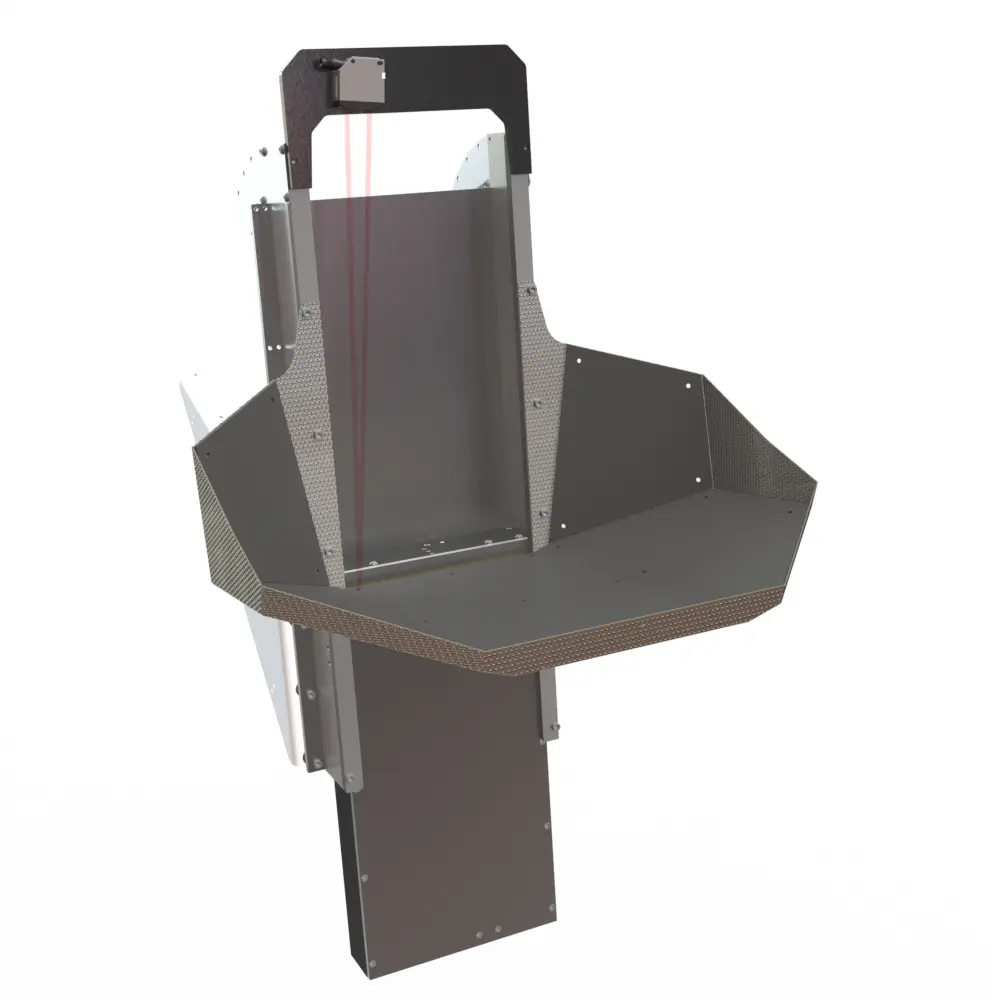
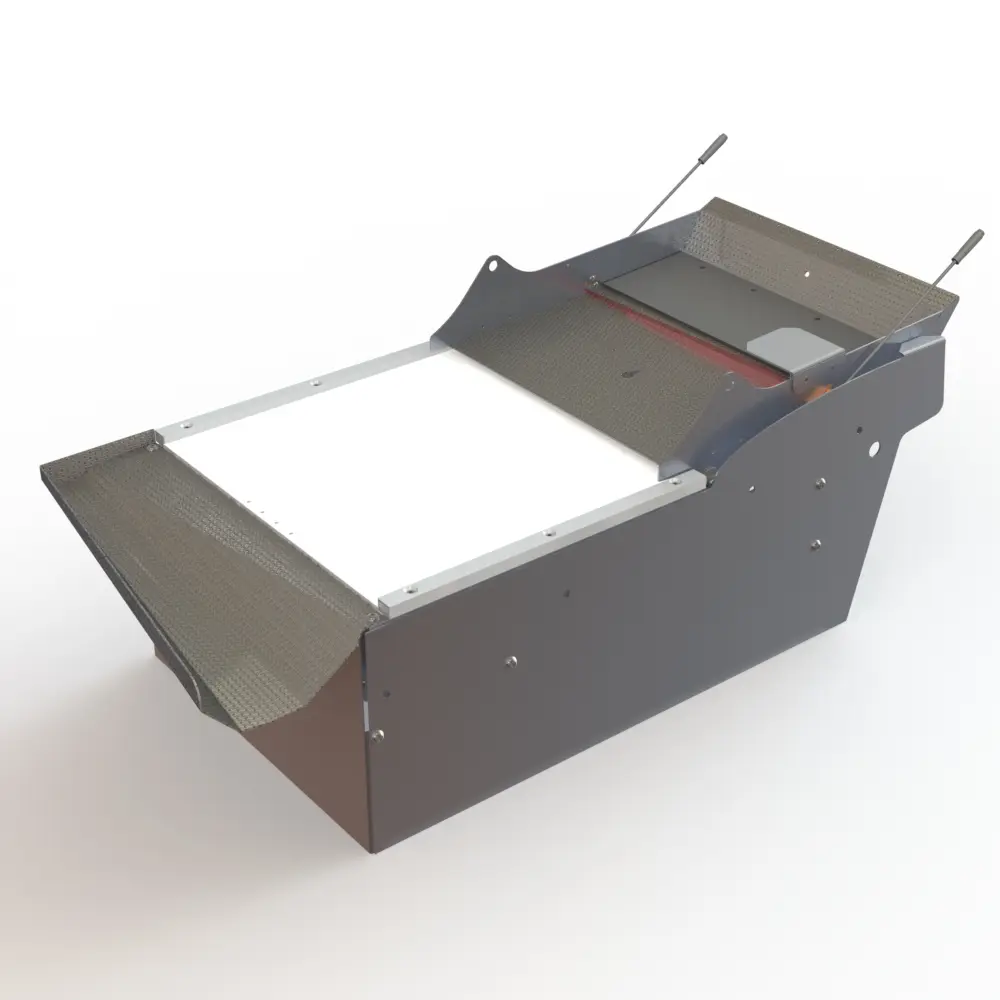
Från att detaljerna hälls i bingen lyfts de upp av en skyttel och faller ned på buffertplåten och sprids ut. Detaljerna kommer sedan ut på visionytan där visionsystemet (Cognex 7000) kan identifiera dem. Detaljernas koordinater skickas till roboten (ABB IRB 120) som plockar upp en detalj och placerar den på önskad plats (platser om man väljer att mönsterlägga) vilket kan vara en hämtningsplats för en annan robot, en monteringsstation eller liknande. De detaljer som av någon anledning inte identifieras av visionsystemet glider av visionytan, hamnar på returbandet och förs tillbaks till bingen.
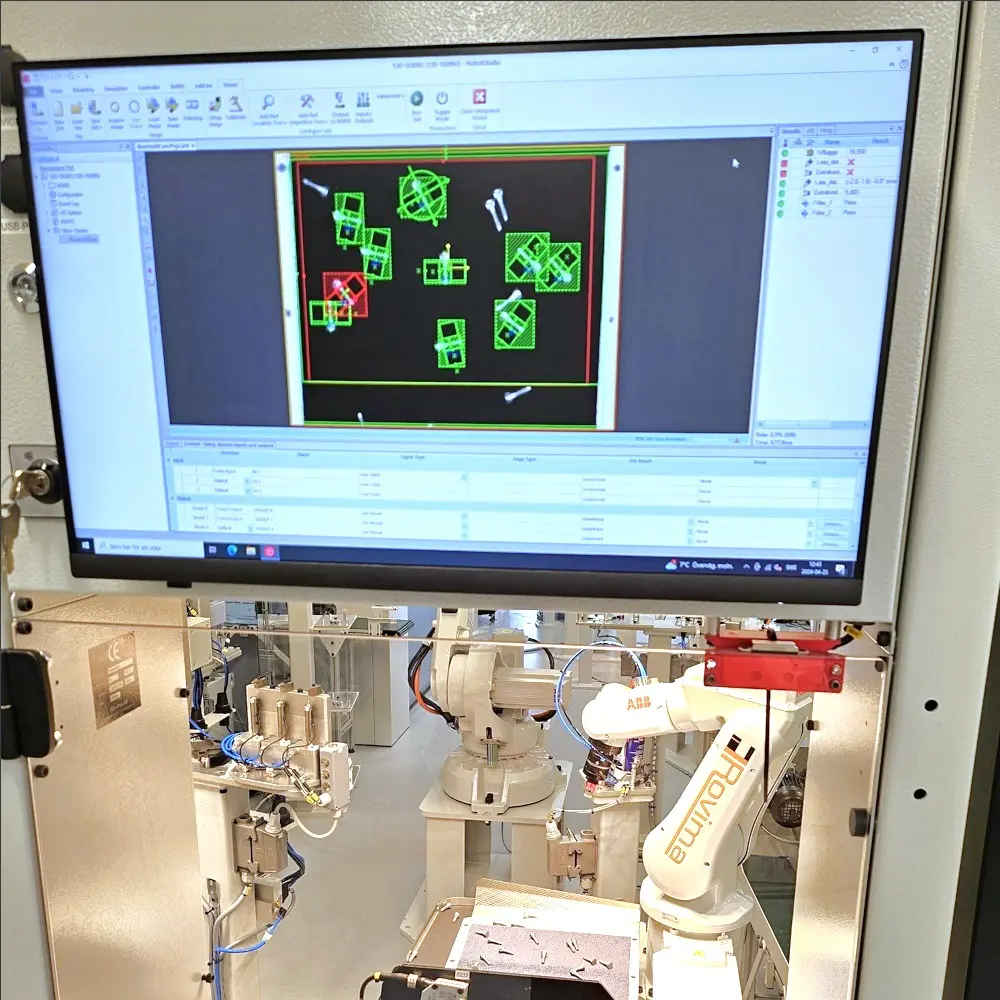
Vision- och programmeringsgränssnitt
På operatörssidan finns programmeringsgränssnittet i form av en PC. Den används i första hand som operatörsgränssnitt. I andra hand för att träna systemet på de nya detaljer som ska matas fram. På skärmen visas senast tagen bild samt ytterligare grafisk återkoppling till användaren. PCn kan även användas för programmodifieringar i roboten. Ändringar i robotprogrammet kan också göras i robotens handpanel men vid större förändringar underlättar det att använda medföljande kostnadsfri PC-mjukvara. PCn är inte avgörande för driften. Driften är inte beroende av PCn. Den är enbart programmeringsgränssnitt samt visuell återkoppling till operatören.
Stativ
Allt är monterat i ett stativ som som innehåller bl.a mekaniska uppfästningspunkter, elektriska inkopplingar och belysning. Belysningen är LED-baserad för att ge högt ljusutbyte under lång tid. De yttra dimensionerna är anpassade för att passa bra in som komponent i större robotceller. Att den bara är 720 mm bred gör att den del av en större robots arbetsområde som upptas är mycket begränsad.
Vi använder cookies för att se till att vi ger dig den bästa upplevelsen på vår webbplats. Om du fortsätter att använda denna webbplats kommer vi att anta att du godkänner detta.